HELLO FRIENDS MY NAME IS MEET. I AM AN ARDUINO PROJECT MAKER. EVERY SUNDAY I WILL UPLOAD A VIDEO OF ARDUINO PROJECT.
THANKS FOR WATCHIG
THANKS FOR WATCHIG
TECHNICAL PROJECT
.
INDEX
1. ANDROID CONTROL CAR
2.ANDROID CONTROL LED
3.ULTRASONIC SENSOR TUTORIAL
1. ANDROID CONTROL CAR
2.ANDROID CONTROL LED
3.ULTRASONIC SENSOR TUTORIAL
1. CODE FOR ANDROID CONTROL CAR
|
#include "EEPROM.h" #define D1 2 // direction of motor rotation 1 #define M1 3 // PWM left motor #define D2 4 // direction of motor rotation 2 #define M2 5 // PWM right motor #define HORN 13 // additional channel 1 //#define autoOFF 2500 // milliseconds after which the robot stops when the connection #define cmdL 'L' // UART-command for left motor #define cmdR 'R' // UART-command for right motor #define cmdH 'H' // UART-command for additional channel (for example Horn) #define cmdF 'F' // UART-command for EEPROM operation #define cmdr 'r' // UART-command for EEPROM operation (read) #define cmdw 'w' // UART-command for EEPROM operation (write) char incomingByte; // incoming data char L_Data[4]; // array data for left motor byte L_index = 0; // index of array L char R_Data[4]; // array data for right motor byte R_index = 0; // index of array R char H_Data[1]; // array data for additional channel byte H_index = 0; // index of array H char F_Data[8]; // array data for EEPROM byte F_index = 0; // index of array F char command; // command unsigned long currentTime, lastTimeCommand, autoOFF; void setup() { Serial.begin(9600); // initialization UART pinMode(HORN, OUTPUT); // additional channel pinMode(D1, OUTPUT); // output for motor rotation pinMode(D2, OUTPUT); // output for motor rotation /*EEPROM.write(0,255); EEPROM.write(1,255); EEPROM.write(2,255); EEPROM.write(3,255);*/ timer_init(); // initialization software timer } void timer_init() { uint8_t sw_autoOFF = EEPROM.read(0); // read EEPROM "is activated or not stopping the car when losing connection" if(sw_autoOFF == '1'){ // if activated char var_Data[3]; var_Data[0] = EEPROM.read(1); var_Data[1] = EEPROM.read(2); var_Data[2] = EEPROM.read(3); autoOFF = atoi(var_Data)*100; // variable autoOFF ms } else if(sw_autoOFF == '0'){ autoOFF = 999999; } else if(sw_autoOFF == 255){ autoOFF = 2500; // if the EEPROM is blank, dafault value is 2.5 sec } currentTime = millis(); // read the time elapsed since application start } void loop() { if (Serial.available() > 0) { // if received UART data incomingByte = Serial.read(); // raed byte if(incomingByte == cmdL) { // if received data for left motor L command = cmdL; // current command memset(L_Data,0,sizeof(L_Data)); // clear array L_index = 0; // resetting array index } else if(incomingByte == cmdR) { // if received data for left motor R command = cmdR; memset(R_Data,0,sizeof(R_Data)); R_index = 0; } else if(incomingByte == cmdH) { // if received data for additional channel command = cmdH; memset(H_Data,0,sizeof(H_Data)); H_index = 0; } else if(incomingByte == cmdF) { // if received data for EEPROM op command = cmdF; memset(F_Data,0,sizeof(F_Data)); F_index = 0; } else if(incomingByte == '\r') command = 'e'; // end of line else if(incomingByte == '\t') command = 't'; // end of line for EEPROM op if(command == cmdL && incomingByte != cmdL){ L_Data[L_index] = incomingByte; // store each byte in the array L_index++; // increment array index } else if(command == cmdR && incomingByte != cmdR){ R_Data[R_index] = incomingByte; R_index++; } else if(command == cmdH && incomingByte != cmdH){ H_Data[H_index] = incomingByte; H_index++; } else if(command == cmdF && incomingByte != cmdF){ F_Data[F_index] = incomingByte; F_index++; } else if(command == 'e'){ // if we take the line end Control4WD(atoi(L_Data),atoi(R_Data),atoi(H_Data)); delay(10); } else if(command == 't'){ // if we take the EEPROM line end Flash_Op(F_Data[0],F_Data[1],F_Data[2],F_Data[3],F_Data[4]); } lastTimeCommand = millis(); // read the time elapsed since application start } if(millis() >= (lastTimeCommand + autoOFF)){ // compare the current timer with variable lastTimeCommand + autoOFF Control4WD(0,0,0); // stop the car } } void Control4WD(int mLeft, int mRight, uint8_t Horn){ bool directionL, directionR; // direction of motor rotation L298N byte valueL, valueR; // PWM M1, M2 (0-255) if(mLeft > 0){ valueL = mLeft; directionL = 0; } else if(mLeft < 0){ valueL = 255 - abs(mLeft); directionL = 1; } else { directionL = 0; valueL = 0; } if(mRight > 0){ valueR = mRight; directionR = 0; } else if(mRight < 0){ valueR = 255 - abs(mRight); directionR = 1; } else { directionR = 0; valueR = 0; } analogWrite(M1, valueL); // set speed for left motor analogWrite(M2, valueR); // set speed for right motor digitalWrite(D1, directionL); // set direction of left motor rotation digitalWrite(D2, directionR); // set direction of right motor rotation digitalWrite(HORN, Horn); // additional channel } void Flash_Op(char FCMD, uint8_t z1, uint8_t z2, uint8_t z3, uint8_t z4){ if(FCMD == cmdr){ // if EEPROM data read command Serial.print("FData:"); // send EEPROM data Serial.write(EEPROM.read(0)); // read value from the memory with 0 address and print it to UART Serial.write(EEPROM.read(1)); Serial.write(EEPROM.read(2)); Serial.write(EEPROM.read(3)); Serial.print("\r\n"); // mark the end of the transmission of data EEPROM } else if(FCMD == cmdw){ // if EEPROM data write command EEPROM.write(0,z1); // z1 record to a memory with 0 address EEPROM.write(1,z2); EEPROM.write(2,z3); EEPROM.write(3,z4); timer_init(); // reinitialize the timer Serial.print("FWOK\r\n"); // send a message that the data is successfully written to EEPROM } } |
2. CODE FOR ANDROID CONTROL LED
void setup() {
Serial.begin(9600);
pinMode(8, OUTPUT); // put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
if(Serial.available()>0)
{
char data= Serial.read(); // reading the data received from the bluetooth module
switch(data)
{
case 'a': digitalWrite(8, HIGH);break; // when a is pressed on the app on your smart phone
case 'd': digitalWrite(8, LOW);break; // when d is pressed on the app on your smart phone
default : break;
}
Serial.println(data);
}
delay(50)
// put your setup code here, to run once:
// put your main code here, to run repeatedly:
Serial.begin(9600);
pinMode(8, OUTPUT); // put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
if(Serial.available()>0)
{
char data= Serial.read(); // reading the data received from the bluetooth module
switch(data)
{
case 'a': digitalWrite(8, HIGH);break; // when a is pressed on the app on your smart phone
case 'd': digitalWrite(8, LOW);break; // when d is pressed on the app on your smart phone
default : break;
}
Serial.println(data);
}
delay(50)
// put your setup code here, to run once:
// put your main code here, to run repeatedly:
3. CODE FOR ULTRASONIC SENSOR TUTORIAL
int trigPin = 9;
int echoPin = 10;
int led = 7;
void setup() {
Serial.begin(9600);
pinMode(led, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// put your setup code here, to run once:
}
void loop() {
long duration, distance;
digitalWrite(trigPin,HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration=pulseIn(echoPin, HIGH);
distance =(duration/2)/29.1;
Serial.print(distance);
Serial.println("CM");
delay(10);
if((distance<=10))
{
digitalWrite(led, HIGH);
}
else if(distance>10)
{
digitalWrite(led, LOW);
}
}
int trigPin = 9;
int echoPin = 10;
int led = 7;
void setup() {
Serial.begin(9600);
pinMode(led, OUTPUT);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
// put your setup code here, to run once:
}
void loop() {
long duration, distance;
digitalWrite(trigPin,HIGH);
delayMicroseconds(1000);
digitalWrite(trigPin, LOW);
duration=pulseIn(echoPin, HIGH);
distance =(duration/2)/29.1;
Serial.print(distance);
Serial.println("CM");
delay(10);
if((distance<=10))
{
digitalWrite(led, HIGH);
}
else if(distance>10)
{
digitalWrite(led, LOW);
}
}
CODE FOR RADAR
CODE FOR ARDUINO RADAR
// Includes the Servo library
#include <Servo.h>.
// Defines Tirg and Echo pins of the Ultrasonic Sensor
const int trigPin = 10;
const int echoPin = 11;
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(12); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/2;
return distance;
}
#include <Servo.h>.
// Defines Tirg and Echo pins of the Ultrasonic Sensor
const int trigPin = 10;
const int echoPin = 11;
// Variables for the duration and the distance
long duration;
int distance;
Servo myServo; // Creates a servo object for controlling the servo motor
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an Output
pinMode(echoPin, INPUT); // Sets the echoPin as an Input
Serial.begin(9600);
myServo.attach(12); // Defines on which pin is the servo motor attached
}
void loop() {
// rotates the servo motor from 15 to 165 degrees
for(int i=15;i<=165;i++){
myServo.write(i);
delay(30);
distance = calculateDistance();// Calls a function for calculating the distance measured by the Ultrasonic sensor for each degree
Serial.print(i); // Sends the current degree into the Serial Port
Serial.print(","); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
Serial.print(distance); // Sends the distance value into the Serial Port
Serial.print("."); // Sends addition character right next to the previous value needed later in the Processing IDE for indexing
}
// Repeats the previous lines from 165 to 15 degrees
for(int i=165;i>15;i--){
myServo.write(i);
delay(30);
distance = calculateDistance();
Serial.print(i);
Serial.print(",");
Serial.print(distance);
Serial.print(".");
}
}
// Function for calculating the distance measured by the Ultrasonic sensor
int calculateDistance(){
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Sets the trigPin on HIGH state for 10 micro seconds
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Reads the echoPin, returns the sound wave travel time in microseconds
distance= duration*0.034/2;
return distance;
}
PROCESSING CODE FOR RADAR
import processing.serial.*; // imports library for serial communication
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1200, 700); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this,"COM3", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
}
void draw() {
fill(98,245,31);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(25);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text(" TECHNICAL PROJECT ", width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40) {
text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277);
}
textSize(25);
fill(98,245,60);
translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
import java.awt.event.KeyEvent; // imports library for reading the data from the serial port
import java.io.IOException;
Serial myPort; // defines Object Serial
// defubes variables
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1200, 700); // ***CHANGE THIS TO YOUR SCREEN RESOLUTION***
smooth();
myPort = new Serial(this,"COM3", 9600); // starts the serial communication
myPort.bufferUntil('.'); // reads the data from the serial port up to the character '.'. So actually it reads this: angle,distance.
}
void draw() {
fill(98,245,31);
// simulating motion blur and slow fade of the moving line
noStroke();
fill(0,4);
rect(0, 0, width, height-height*0.065);
fill(98,245,31); // green color
// calls the functions for drawing the radar
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) { // starts reading data from the Serial Port
// reads the data from the Serial Port up to the character '.' and puts it into the String variable "data".
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(","); // find the character ',' and puts it into the variable "index1"
angle= data.substring(0, index1); // read the data from position "0" to position of the variable index1 or thats the value of the angle the Arduino Board sent into the Serial Port
distance= data.substring(index1+1, data.length()); // read the data from position "index1" to the end of the data pr thats the value of the distance
// converts the String variables into Integer
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
noFill();
strokeWeight(2);
stroke(98,245,31);
// draws the arc lines
arc(0,0,(width-width*0.0625),(width-width*0.0625),PI,TWO_PI);
arc(0,0,(width-width*0.27),(width-width*0.27),PI,TWO_PI);
arc(0,0,(width-width*0.479),(width-width*0.479),PI,TWO_PI);
arc(0,0,(width-width*0.687),(width-width*0.687),PI,TWO_PI);
// draws the angle lines
line(-width/2,0,width/2,0);
line(0,0,(-width/2)*cos(radians(30)),(-width/2)*sin(radians(30)));
line(0,0,(-width/2)*cos(radians(60)),(-width/2)*sin(radians(60)));
line(0,0,(-width/2)*cos(radians(90)),(-width/2)*sin(radians(90)));
line(0,0,(-width/2)*cos(radians(120)),(-width/2)*sin(radians(120)));
line(0,0,(-width/2)*cos(radians(150)),(-width/2)*sin(radians(150)));
line((-width/2)*cos(radians(30)),0,width/2,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
strokeWeight(9);
stroke(255,10,10); // red color
pixsDistance = iDistance*((height-height*0.1666)*0.025); // covers the distance from the sensor from cm to pixels
// limiting the range to 40 cms
if(iDistance<40){
// draws the object according to the angle and the distance
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),(width-width*0.505)*cos(radians(iAngle)),-(width-width*0.505)*sin(radians(iAngle)));
}
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,250,60);
translate(width/2,height-height*0.074); // moves the starting coordinats to new location
line(0,0,(height-height*0.12)*cos(radians(iAngle)),-(height-height*0.12)*sin(radians(iAngle))); // draws the line according to the angle
popMatrix();
}
void drawText() { // draws the texts on the screen
pushMatrix();
if(iDistance>40) {
noObject = "Out of Range";
}
else {
noObject = "In Range";
}
fill(0,0,0);
noStroke();
rect(0, height-height*0.0648, width, height);
fill(98,245,31);
textSize(25);
text("10cm",width-width*0.3854,height-height*0.0833);
text("20cm",width-width*0.281,height-height*0.0833);
text("30cm",width-width*0.177,height-height*0.0833);
text("40cm",width-width*0.0729,height-height*0.0833);
textSize(40);
text(" TECHNICAL PROJECT ", width-width*0.875, height-height*0.0277);
text("Angle: " + iAngle +" °", width-width*0.48, height-height*0.0277);
text("Distance: ", width-width*0.26, height-height*0.0277);
if(iDistance<40) {
text(" " + iDistance +" cm", width-width*0.225, height-height*0.0277);
}
textSize(25);
fill(98,245,60);
translate((width-width*0.4994)+width/2*cos(radians(30)),(height-height*0.0907)-width/2*sin(radians(30)));
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate((width-width*0.503)+width/2*cos(radians(60)),(height-height*0.0888)-width/2*sin(radians(60)));
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate((width-width*0.507)+width/2*cos(radians(90)),(height-height*0.0833)-width/2*sin(radians(90)));
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(width-width*0.513+width/2*cos(radians(120)),(height-height*0.07129)-width/2*sin(radians(120)));
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate((width-width*0.5104)+width/2*cos(radians(150)),(height-height*0.0574)-width/2*sin(radians(150)));
rotate(radians(-60));
text("150°",0,0);
popMatrix();
}
CODE FOR HOW TO CONTROL LED USING VOICE COMMANDS
String voice;
int led1 = 2;
int led2 = 3;
int led3 = 4;
void allon() {
digitalWrite (led1, HIGH);
digitalWrite (led2, HIGH);
digitalWrite (led3, HIGH);
}
void allof() {
digitalWrite (led1, LOW);
digitalWrite (led2, LOW);
digitalWrite (led3, LOW);
}
void readon() {
digitalWrite (led1, HIGH);
digitalWrite (led2, LOW);
digitalWrite (led3, LOW);
}
void yellowon() {
digitalWrite (led1, LOW);
digitalWrite (led2, HIGH);
digitalWrite (led3, LOW);
}
void setup() {
Serial.begin(9600);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
}
void loop() {
while(Serial.available()) {
delay(10);
char c=Serial.read();
if(c=='#')
{break; }
voice += c;
}
if (voice.length() > 0) {
Serial.println(voice);
if (voice == "*all on")
{allon() ; }
else if (voice == "*all of")
{allof() ; }
if (voice == "*read on")
{readon() ; }
else if (voice == "*yellow on")
{yellowon() ; }
voice="";
}
}
String voice;
int led1 = 2;
int led2 = 3;
int led3 = 4;
void allon() {
digitalWrite (led1, HIGH);
digitalWrite (led2, HIGH);
digitalWrite (led3, HIGH);
}
void allof() {
digitalWrite (led1, LOW);
digitalWrite (led2, LOW);
digitalWrite (led3, LOW);
}
void readon() {
digitalWrite (led1, HIGH);
digitalWrite (led2, LOW);
digitalWrite (led3, LOW);
}
void yellowon() {
digitalWrite (led1, LOW);
digitalWrite (led2, HIGH);
digitalWrite (led3, LOW);
}
void setup() {
Serial.begin(9600);
pinMode(led1, OUTPUT);
pinMode(led2, OUTPUT);
pinMode(led3, OUTPUT);
}
void loop() {
while(Serial.available()) {
delay(10);
char c=Serial.read();
if(c=='#')
{break; }
voice += c;
}
if (voice.length() > 0) {
Serial.println(voice);
if (voice == "*all on")
{allon() ; }
else if (voice == "*all of")
{allof() ; }
if (voice == "*read on")
{readon() ; }
else if (voice == "*yellow on")
{yellowon() ; }
voice="";
}
}
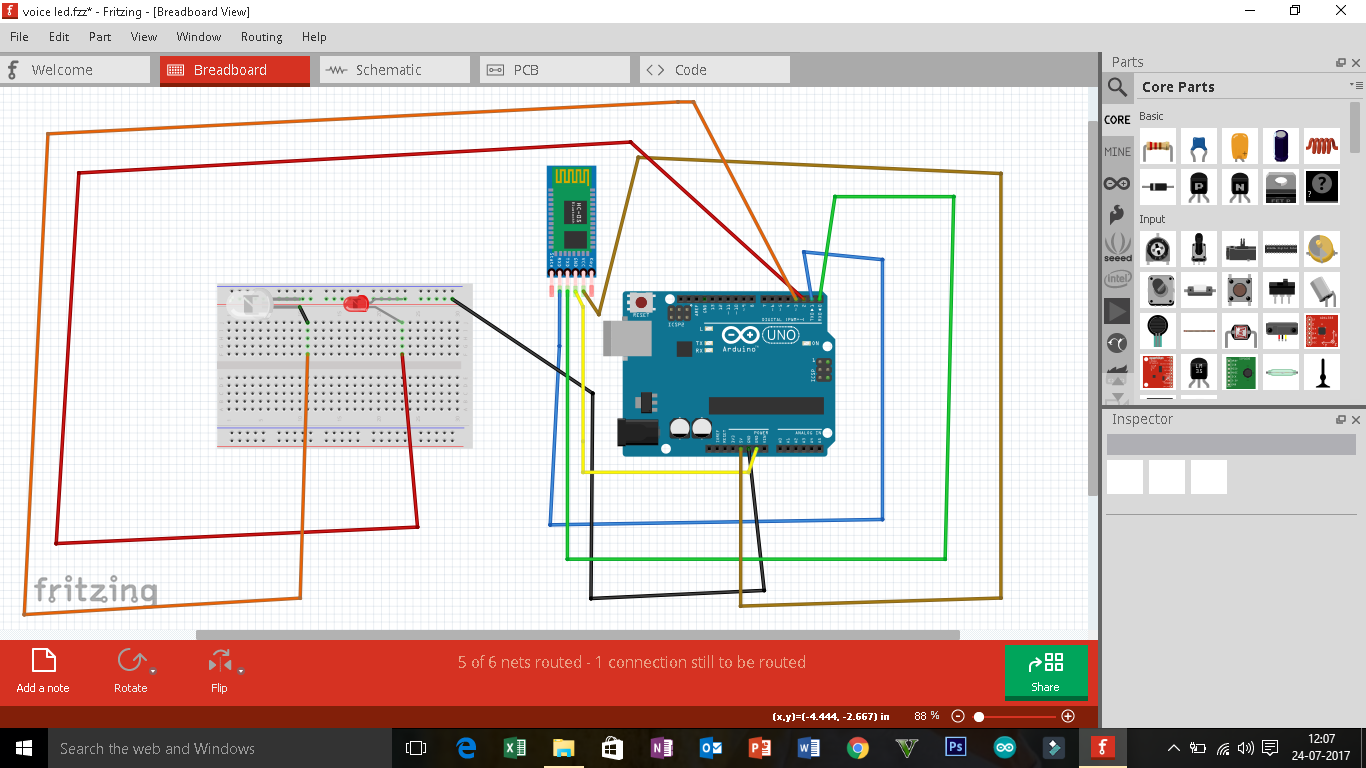
CIRCUIT DIAGRAM OF VOICE LED